
diff options
| author | Dmitry V. Sokolov <ssloy@users.noreply.github.com> | 2020-02-19 18:00:06 +0300 |
|---|---|---|
| committer | GitHub <noreply@github.com> | 2020-02-19 18:00:06 +0300 |
| commit | d1b88d72006551b1bf3fd1d360841a81329c5dce (patch) | |
| tree | c31e025811b13cc2daf0bca3b8da29974cbb72a3 | |
| parent | 042759a40d69575f003cfdf678b9cc9c6d592a8a (diff) | |
Update README.md
| -rw-r--r-- | README.md | 8 |
1 files changed, 6 insertions, 2 deletions
@@ -112,12 +112,16 @@ OCR2 = 1500/16; // center servo ``` ## Movement planner -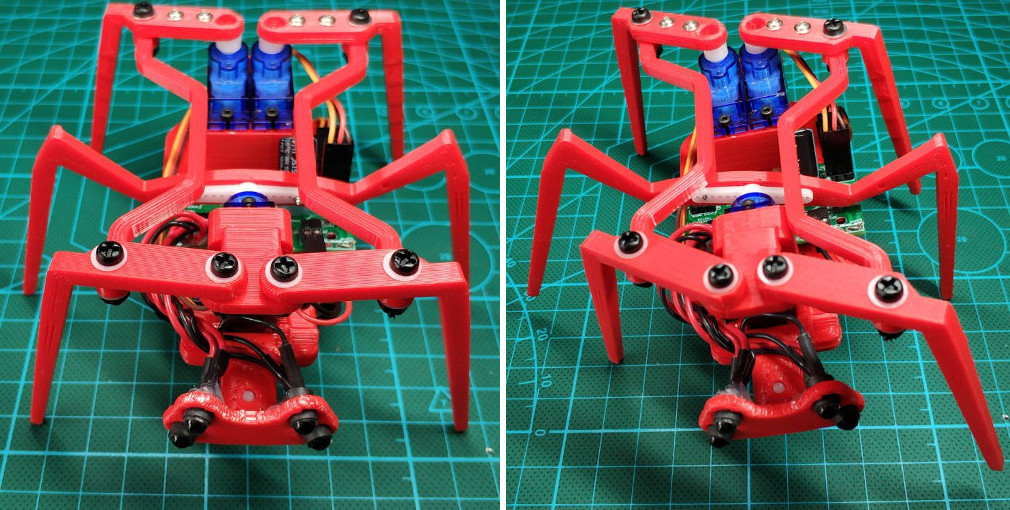 - +First of all, there are 6 important constants in the code: ```c const uint8_t zero[3] = {45, 50, 40}; // zero position of the servo (degrees) const uint8_t range[3] = {25, 25, 20}; // the servos are allowed to move in the zero[i] +- range[i] interval ``` +The `zero[3]` array provides the angles of all three servos corresponding to the neutral stance (left image): + + + +Ideally, these angles are to be at 45° (midpoint of the servo range), but in practice if we set the servos to 45°, the legs won't be aligned due to descreet teeth position on the shaft. Next, `range[3]` specifies the admissible range. It means that the servo `i` is allowed to move in the `zero[i]-range[i]`to `zero[i]+range[i]` interval. Current servo position (in degrees, 0°-90°) is supposed to be stored in the `uint8_t pos[3]` array. When calling `update_servo_timers()`, the timers are updated according to the array. |