
diff options
| author | Dmitry V. Sokolov <ssloy@users.noreply.github.com> | 2020-02-18 02:32:46 +0300 |
|---|---|---|
| committer | GitHub <noreply@github.com> | 2020-02-18 02:32:46 +0300 |
| commit | aa70acf956a86a50cceeed98fbf27336cc758508 (patch) | |
| tree | 9440b81b01f44453e3872062d0e92a8b458e9fb6 | |
| parent | b2dd89aa1699db73e91254e1bceb5cca244594b0 (diff) | |
Update README.md
| -rw-r--r-- | README.md | 19 |
1 files changed, 13 insertions, 6 deletions
@@ -4,13 +4,11 @@ Check Penny dancing to funky music (clickable): [](https://youtu.be/quMe5CEoOok) -# Credits - -Penny has two elder sisters, [Penny](https://youtu.be/7Py03SH5DbE) and [Penny](https://youtu.be/PiVTC8JhZTQ). Note that I have no hardware contributions, all I did is to gather the information, assemble things and write the firmware. I want this wonderful robot to be easy to clone, therefore I created this repository. The original Penny#1 is created by [Jeremy Zimmer](https://www.robotshop.com/community/robots/show/penny). The wiring being cumbersome and cheapduino being discontinued, Dennis van Elteren has designed the motherboard that I also use. Thus Penny#2 was born. Here I present you Penny#3. While I have Dennis' approbation to publish his files, I failed to contact Jeremy. The software, however is distributed under the DO WHAT THE FUCK YOU WANT TO PUBLIC LICENSE. +## Credits +Penny has two elder sisters, [Penny](https://youtu.be/7Py03SH5DbE) and [Penny](https://youtu.be/PiVTC8JhZTQ). Note that I have no hardware contributions, all I did is to gather the information, assemble things and write the firmware. I want this wonderful robot to be easy to clone, therefore I created this repository. The original Penny#1 is created by [Jeremy Zimmer](https://www.robotshop.com/community/robots/show/penny). The wiring being cumbersome and cheapduino being discontinued, Dennis van Elteren has designed the motherboard that I also use. Thus Penny#2 was born. Here I present you Penny#3. While I have Dennis' sanction to publish his files, I failed to contact Jeremy. The software, however is distributed under the DO WHAT THE FUCK YOU WANT TO PUBLIC LICENSE. # How to clone ## The body - It is quite straightforward, if you have a printer, just print it. All the body parts are shown here: 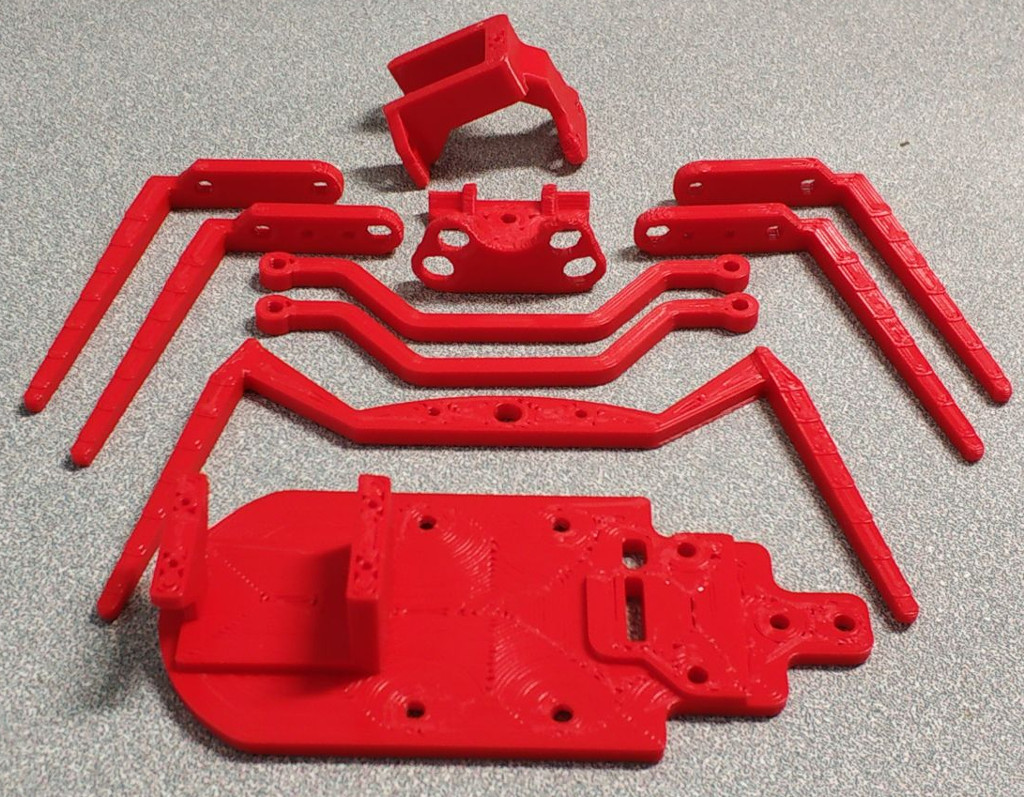 @@ -19,7 +17,6 @@ When assembled, it should look like this beast:  ## The motherboard - 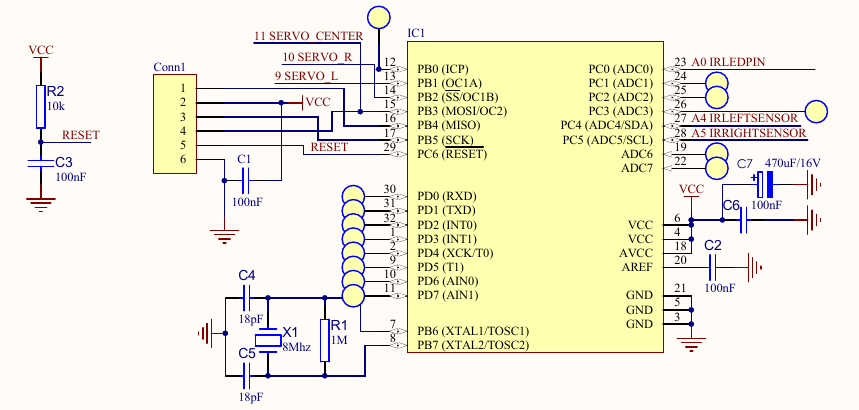 ### Bill of materials @@ -35,8 +32,18 @@ Printing the body costs next to nothing if you have a 3d printer. Here are the m ### The proximity sensor - 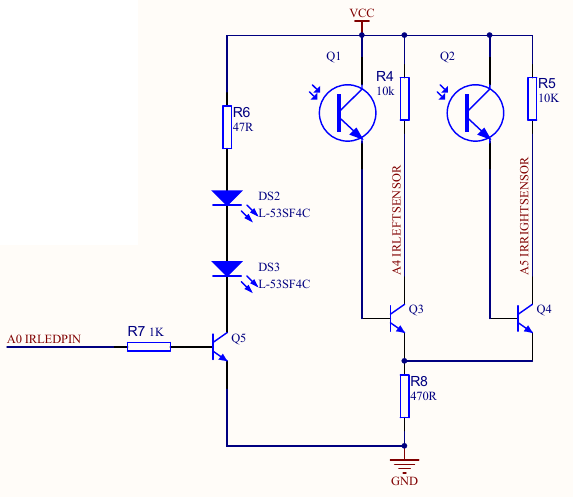  +# Wishlist +If you are a good soul willing to create a V2 of the motherboard, you are very welcome to do so. Here are the things that I'd like to be fixed/added/modified in the motherboard: +* The main thing is the on/off switch to cut off servo motors during flashing; +* Remove the crystal, internal RC should be just enough; +* Replace through-hole components by their SMD analogs; +* Propose good (small and foolproof) connectors instead of pin headers and optimize their placement; +* IR LEDs pads are very hard to reach under the center servo. The only viable option with the V1 motherboard is to solder the wires; +* Move a little bit the big capacitor. I had to incline it, otherwise the screw in center legs would destroy it; +* Add test pads easy to access with an oscilloscope; +* Add a couple of debug LEDs; +* Create good soldering points for unused ATMega8 pins for debugging and further extension. |